वैज्ञानिकों ने एक चौपाया रोबोट विकसित किया है जो अपने पिछले पैरों पर चलते हुए अपने आगे के दो पैरों का इस्तेमाल वस्तुओं को उठाने और संभालने के लिए कर सकता है। चौपाया रोबोट आमतौर पर रोबोट कुत्तों का रूप लेते हैं, जिसमें बोस्टन डायनेमिक्स स्पॉट भी शामिल है। वे चुनौतीपूर्ण इलाकों में तेजी से चल सकते हैं और आमतौर पर उनका गुरुत्वाकर्षण केंद्र कम होता है। अधिकांश ऑब्जेक्ट-मैनिपुलेटिंग चौपाया में दो अतिरिक्त भुजाएँ होती हैं जो वस्तुओं को उठा और ले जा सकती हैं – जिसका अर्थ है कि उनके पास कुल छह “अंग” हैं। लेकिन “
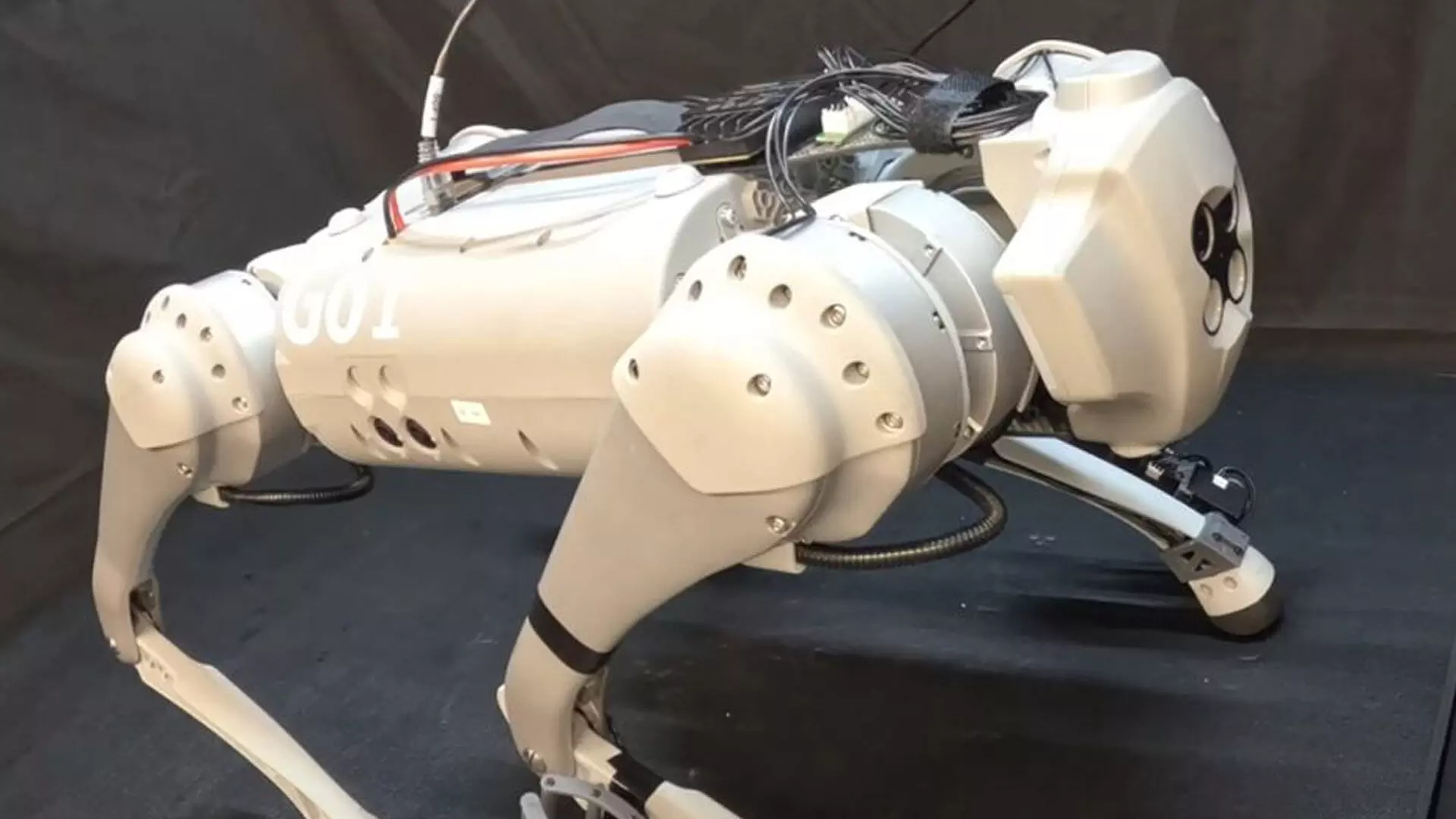
Locoman” रोबोट अद्वितीय है क्योंकि यह अपने चारों पैरों से खड़े होने की मुद्रा में बदल सकता है और वस्तुओं को हेरफेर करने के लिए अपने आगे के दो पैरों का उपयोग कर सकता है। वैज्ञानिकों ने 27 मार्च को arXiv प्रीप्रिंट सर्वर पर पोस्ट किए गए एक अध्ययन में बताया कि रोबोट कैसे काम करता है।
“इस पेपर में, हम Locoman प्रस्तुत करते हैं, एक नया दृष्टिकोण जो डिज़ाइन किए गए हल्के लोको-मैनिपुलेटर के एकीकरण के माध्यम से चौपाया रोबोट की हेरफेर निपुणता को बढ़ाता है, उनके परिचालन कार्यक्षेत्र का विस्तार करता है और जटिल 6D हेरफेर कार्यों पर सटीक नियंत्रण सक्षम करता है,” वैज्ञानिकों ने पेपर में कहा। डिज़ाइन में एक चौपाया की गतिशीलता को “मैनिपुलेटर” की कार्यक्षमता के साथ जोड़ा गया है, जो इस मामले में रोबोट पर हाथ जैसे भागों को संदर्भित करता है जो किसी वस्तु को नियंत्रित या संभाल सकता है। यहाँ मुख्य बात यह है कि वस्तुओं को संभालने की क्षमता को लोकोमैन की चपलता से समझौता किए बिना विकसित किया गया है। हालाँकि, इसके बहुक्रियाशील पैरों ने चुनौतीपूर्ण वातावरणों, जैसे कि सीमित स्थानों और चट्टानी इलाकों में भी बहुमुखी प्रतिभा का प्रदर्शन किया। रोबोट ने उन कार्यों के दौरान सटीक और स्थिर आंदोलनों का प्रदर्शन किया, जिनके लिए “जटिल दोहरे हाथ समन्वय” की आवश्यकता थी। यह लोकोमैन को अन्य चौपाया रोबोटों से अलग करता है।